 |
Bitirme Projeleri |
|
|
Bitirme Projeleri |
|
|
Bu kısımda öğrencilerimizin bitirme ve yıl içi projelerinde ve başka vesilelerle yaptığı çalışmalardan örnekler verilecektir, ileriye dönük proje çalışmalarından da bahsedilecektir.
Mekanizma Simülasyonları Krank-Biyel Mekanizması
Diğer Mekanizmalar
Robotlar Kollu Robot
Tam boy resmi görmek için resim üzerine tıklayınız.
Beş DC motorla, tutucu, bilek, dirsek, omuz ve gövde hareketleri yapabilir. Her bir hareket robota bağlı kontrol panelinden elle ileri ve geri olarak kontrol edilebilir. Ayrıca, bilgisayara bağlama ünitesiyle paralel porttan bilgisayarla kontrol edilebilir. Fakat ne yazık ki geri besleme olmadığından hassas pozisyon belirlemesi yapılamamaktadır. Bütün mafsallarda kayma koruması olduğundan, motorların dönme sınırları aşıldığında robot zarar görmez. Robot, dört adet D tipi pille çalışır. Bu robotun bilgisayardan kontrolü için öğrencilerimizin Visual Basic 6 kullanarak yazdığı programın ara yüzü aşağıdaki şekilde görülmektedir. Bu programla, fare kullanarak robota, yapabileceği bütün hareketler yaptırılabilir.
Tam boy resmi görmek için resim üzerine tıklayınız. Bir sonraki proje konusu olarak, bu programda yapılan hareketlerin kaydedilmesi ve daha sonra tekrar otomatik olarak çalıştırılması olabilir. Daha sonraki bir aşama ise ileri ve ters kinematik denklemlerini kullanarak hesaplanan açılarla robotu hareket ettirmek olabilir.
WAO-G Programlanabilir Çizim Robotu
WOA-G, bulanık mantıkla çalışan programlanabilir bir robottur. Her yöne hareket edebilir. If-then türü mantık kararları verecek veya sensör girdisine bağlı kararlar veren programları çalıştırabilir. Robotun üzerine yerleştirilmiş 26 düğmeli paneli vardır. Ayrıca şekilde görülen iki tane mekanik sensöre sahiptir. Bu sensörlerin on veya off oluşuna göre robot üzerindeki düğmelerle program yazılabilir. Örneğin, robotun bir masanın üzerinde masadan düşmeden devamlı olarak gezinmesinin programını yazabilirsiniz. Robot masanın kenarına yaklaştığında bu sensörleri off olur robot biraz geri gider ve kendi etrafında dönerek yoluna devam eder ve aşağı düşmez. Robotun altında kalem tutacak bir yer vardır. Robotu programlayarak, robota yazı yazdırılabilir veya değişik şekiller çizdirilebilir. Bu ve benzeri robotlar için http://www.robotstore.com adresine bakabilirsiniz.
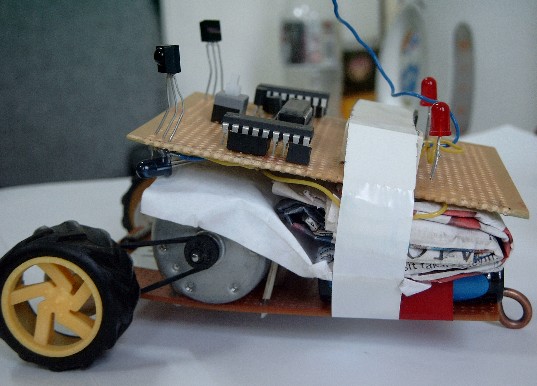
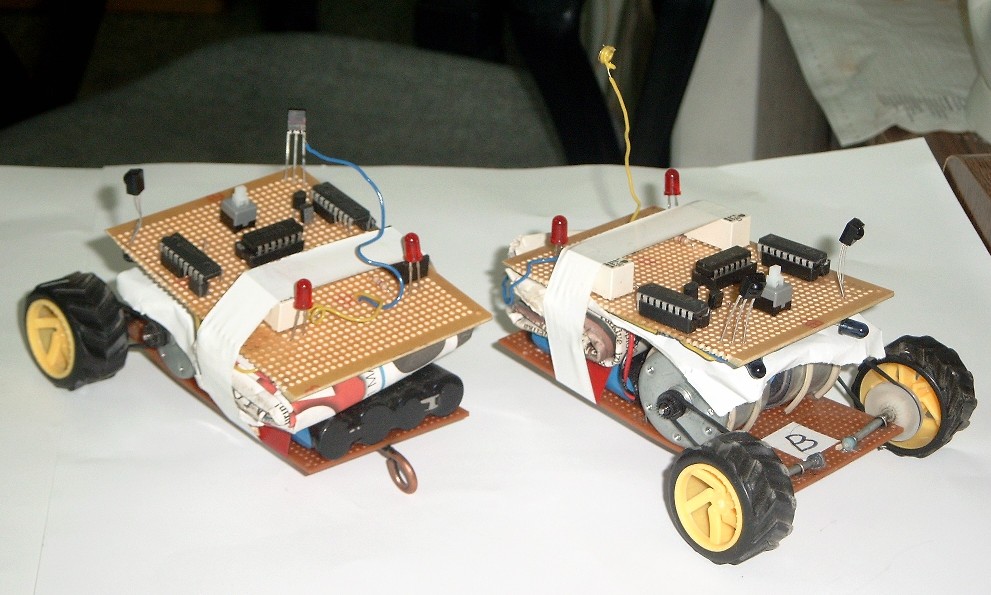
Şekildeki robotun öğrencilerimiz tarafından tasarlanmıştır. Robotun kontrol ünitesinde PIC mikro denetleyicisi kullanılmıştır. Robotun iki tane tekerleği birbirinden bağımsız olarak iki ayrı DC motorla kontrol edilir. İki tane sensör robotun önünde engel olup olmadığı bilgisini PIC'e yollar. Hangi sensör bu bilgiyi yollamışsa ona bağlı motor ters yönde dönerek engelden kaçınmaya çalışır. Robotun motor-tekerlek bağlantısı kayış kasnak sistemiyle sağlanmaktadır. Fakat bu sistem yeterli hız azaltması yapamadığından, robot çok hızlı hareket etmektedir. motorlar sensörlerden bilgiyi alıp geri dönmeye başlasa bile robot çok hızlı olduğundan duramayıp engele çarpmaktadır. Bu ve benzeri problemlerin çözülmesi yeni projelerin konusu olacaktır.
Motorlar Floppy Disk Step Motor Kontrolü
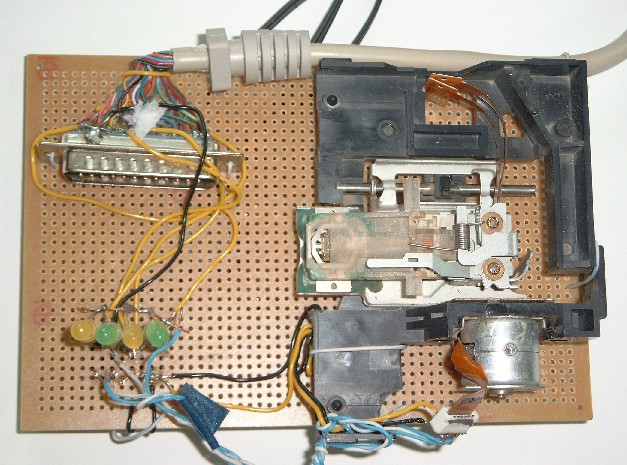
Şekilde bir bilgisayardan sökülmüş eski bir floopy disk sürücüsünün içi görülmektedir. Bu sürücünün kafası 20 mm lik bir bölgede bir step motora bağlı dişli yardımıyla gidip gelerek disketteki bilgiyi okur. Burada step motorun kabloları paralel port aracılığıyla bilgisayara bağlanmış ve kolayca yazılan bir programla istenildiği gibi hareket ettirilmektedir. Örneğin iki adım ileri git bir adım geri gel, tekrar ileri git gibi.
Step Motor Kontrolü
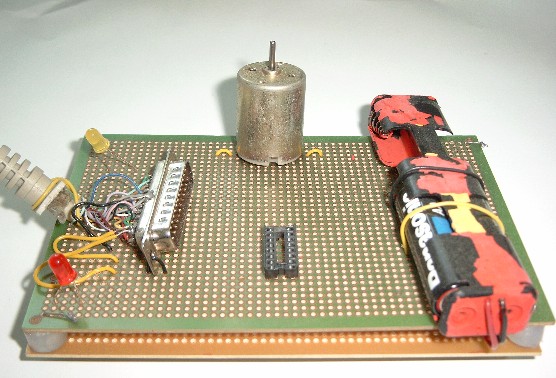
Aşağıda tek bir step motor görülmektedir. Bu motor da yukarıdaki gibi bilgisayarla kolayca hareket ettirilebilir. Şu anda yazdığımız bir programda bu motorun hareketi farenin X koordinatına bağlanmıştır. Yani fareyi hareket ettirince motor buna bağlı olarka çalışır. Bir sonraki proje konusu olarak, bu step motorlardan ikisinin hareketi bilgisayar faresinin x ve koordinatlarına bağlanarak basit bir X-Y table yapılabilir.
PIC Program Yükleme Devresi Şekildeki DC motor yine bilgisayardan kontrol edilerek sağa ve sola döndürülmektedir. Sisten çok basittir. Bilgisayar sadece dönüş yönünü ve hız sinyalini verir. Motor gücünü ayrı bir güç kaynağından alır.
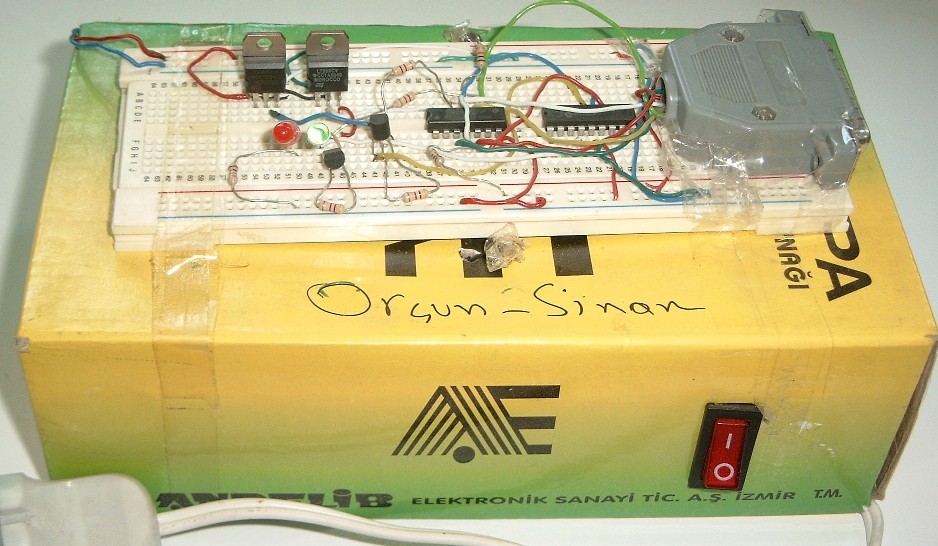
Mikro Kontrol Ediciler PIC Program Yükleme Devresi Şekilde kendi yapımımız bir güç kaynağının üstünde PIC kontrol edicisine bilgisayardan program yüklemeye yaraya devre görülmektedir.
Siemens Logo Kontrollü Asansör Şekildeki maket asansör Siemens Logo nin uygulaması için tasarlanmıştır. Asansör kontrol panelindeki yukarı ve aşağı hareket düğmeleriyle çalıştırılır, en yukarıya veya en aşağıya ulaştığında buralarda olan birer mekanik sensör vasıtasıyla durdurulur. Asansör hareketi daha ileri seviyede işler yaptırılabilir. Örneğin mekanik sensörler değiştirilebilir. Asansör orta katta durdurulabilir.
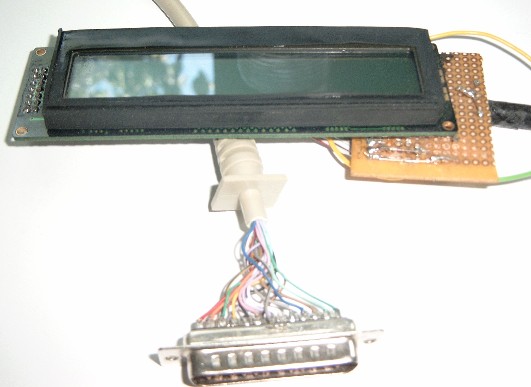
LCD Panel Kontrolü Şekildeki LCD panel bilgisayarda yazılan yazıyı ekranında gösterir. Ne yazık ki bozuk bir güç kaynağı yüzünden bu paneli yaktık! Artık çalışmıyor.
SolidWorks Türkçe Notlar Solidworks öğrenmek isteyenler, bu notlarla Solidworks'e kolaylıkla başlayabilirler. Bilgisayar Programlama Visual C ++ veya Visual Basic kullanarak mühendislikle ilgili bir çok uygulama yapılabilir. Bu konuda proje almak isteyen öğrencilerin bu dillerden birini bilmeleri, en azından bilgisayar programlama ile ilgilenmiş olmaları gerekmektedir. Aksi taktirde önce programı öğrenip sonra uygulama yapmak pratik olmamaktadır. Programlama dışında 3D Max gibi programlarla modelleme ve canlandırma proje konusu olabilir.
|
|
|
Ana Sayfa Özgeçmiş Araştırma Konuları Yayınlar Projeler Dersler Bilgisayar Prog. Robot Yazılım Robotik Bitirme Projeleri
|





{kind=link}
{kind=link}
{kind=link}
{kind=link}