Click the picture to see the larger picture.
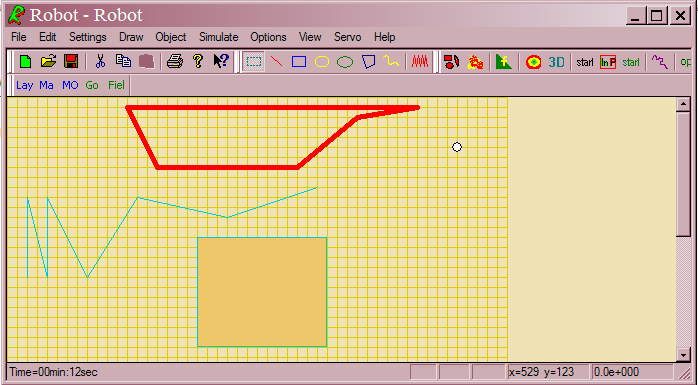
RoboKol software has been developed
with Visual C++ for kinematic control of
redundant robots. The most important features of the software are to
draw obstacles and robots on the screen, to obtain two and three dimensional
images of the potential field and to observe robots reaching the
goal.
Download RoboKol in a single *.zip
file;
RoboKolRelease.zip
Alternatively,
you may download RoboKol.msi. However, it only works in Windows XP.
RoboKol.msi
Object Arrays Robot Demo
|